I think rotation around a line can be described with the axis-angle representation that the slide 45 mentions. The "axis" in the axis-angle representation refers to a unit vector that indicates the direction of the rotation, i.e. a scaled down line.
dawwctor
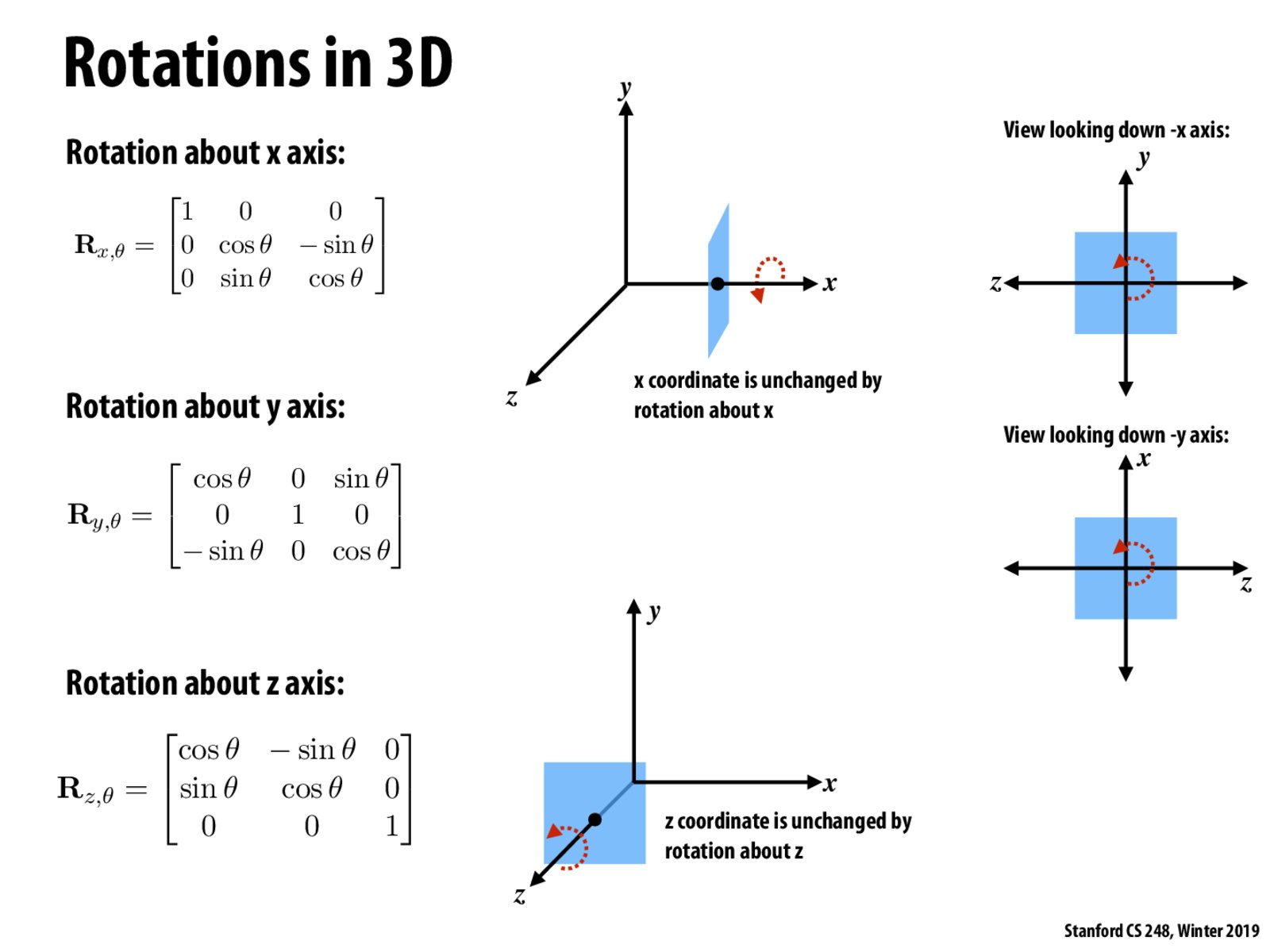
So for 3D rotations, is a rotation of positive degrees always counterclockwise around an axis? If so, does that mean we can kinda represent 2D rotations as rotations around a z-axis pointing out of the page?
maq
so since order of rotation matters for 3d rotations, do you have to rotate around one axis at a time? Or is there a way to combine the matrices (such as for other transformations when you multiply them) for a given order of rotations about more than 1 axis?
seanxu
https://en.wikipedia.org/wiki/Rotation_matrix has pretty good explanation about rotation around unit vector axis. Also, the 2D rotation matrix is just the first 2 rows and columns of the 3D rotation matrix around z axis
How can rotation be done around another line?
I think rotation around a line can be described with the axis-angle representation that the slide 45 mentions. The "axis" in the axis-angle representation refers to a unit vector that indicates the direction of the rotation, i.e. a scaled down line.
So for 3D rotations, is a rotation of positive degrees always counterclockwise around an axis? If so, does that mean we can kinda represent 2D rotations as rotations around a z-axis pointing out of the page?
so since order of rotation matters for 3d rotations, do you have to rotate around one axis at a time? Or is there a way to combine the matrices (such as for other transformations when you multiply them) for a given order of rotations about more than 1 axis?
https://en.wikipedia.org/wiki/Rotation_matrix has pretty good explanation about rotation around unit vector axis. Also, the 2D rotation matrix is just the first 2 rows and columns of the 3D rotation matrix around z axis