How do we keep track of "near" off-camera items as the camera rotates? It seems like there are far too many potential points to consider that could come into our field of view in a frame or two with significant camera motion.
a_s
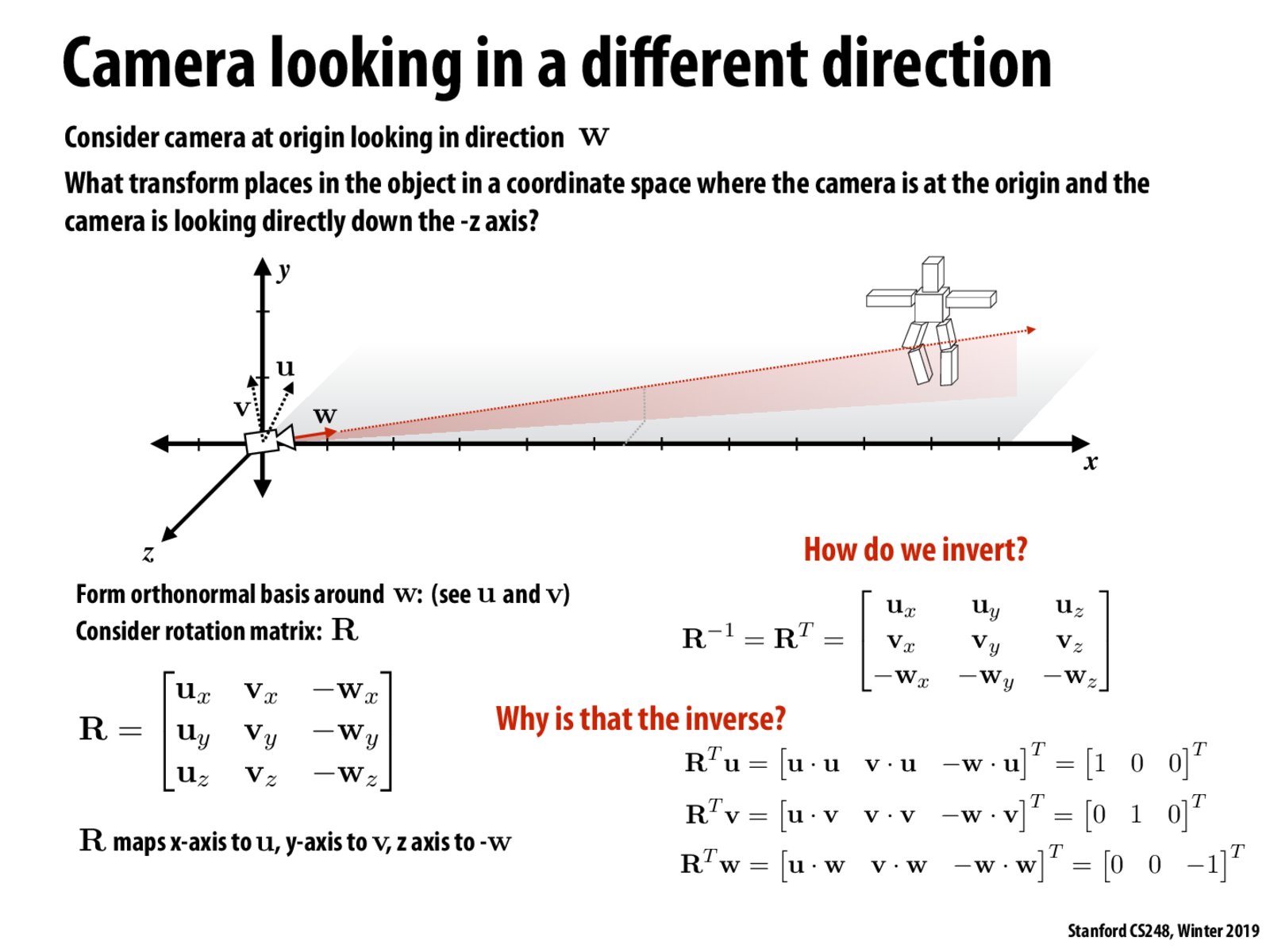
Can someone explain what is happening in this slide? I understand that we want to turn the u-axis into the x-axis, the v-axis into the y-axis, and the w-axis into the -z-axis to essentially change the coordinate system we are using. Is that just how we are getting rotation matrix R? By just swapping the axes? And where does the inverse come into play? Is the idea that multiplying each point in the object by R^T (the inverse of R) will give us its new "position" in our desired xyz coordinate space?
acb575
@a_s Yes, the rotation matrix converts the (x,y,z) axes to (u,v,w) axes, i.e. changing the frame. R^(-1) converts (u,v,w) axes to (x,y,z) axes. R^(-1) = R^{T} for a rotation matrix.
How do we keep track of "near" off-camera items as the camera rotates? It seems like there are far too many potential points to consider that could come into our field of view in a frame or two with significant camera motion.
Can someone explain what is happening in this slide? I understand that we want to turn the u-axis into the x-axis, the v-axis into the y-axis, and the w-axis into the -z-axis to essentially change the coordinate system we are using. Is that just how we are getting rotation matrix R? By just swapping the axes? And where does the inverse come into play? Is the idea that multiplying each point in the object by R^T (the inverse of R) will give us its new "position" in our desired xyz coordinate space?
@a_s Yes, the rotation matrix converts the (x,y,z) axes to (u,v,w) axes, i.e. changing the frame. R^(-1) converts (u,v,w) axes to (x,y,z) axes. R^(-1) = R^{T} for a rotation matrix.
Here is a nice explanation in the last 7 slides.
Are there any good ways to understand why the rotation matrix looks like this?
Why is "w" negative here?
Then negative "w" means we want to make the camera looking down z-axis.