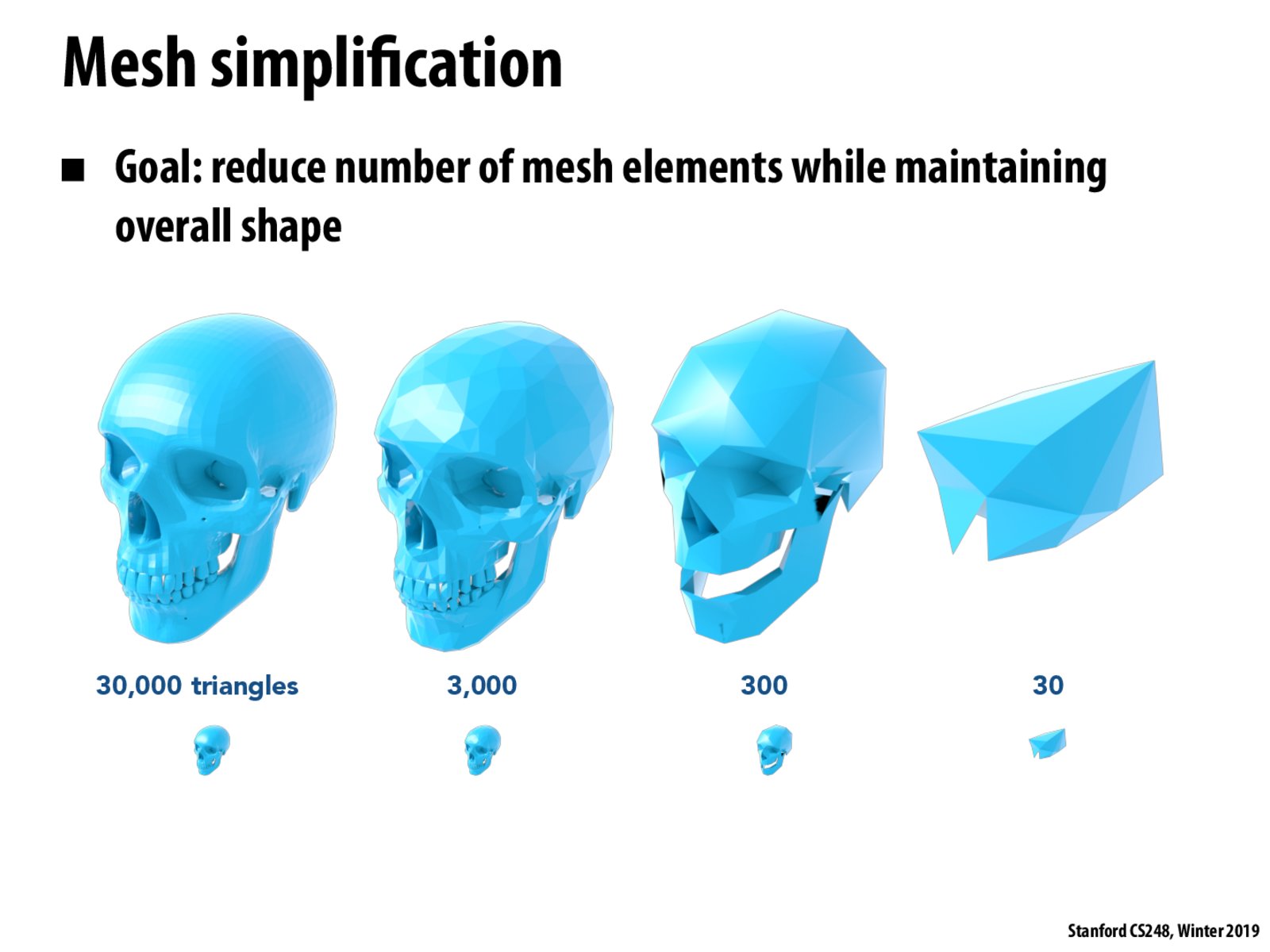
In class we learned about one mesh simplification strategy in detail, but there are actually many ways of simplifying meshes out there. This is a great read that summarizes various mesh simplification techniques: http://jerrytalton.net/research/t-ssmsa-04/paper.pdf
In essence, simplification strategies can be grouped into two categories: local strategies that iteratively simplifies the mesh by the repeated application of a local operator, and global strategies that can be applied to the input mesh as a whole. Simplification via quadratic error is a local strategy, and that is what we learned about today. The three local strategies that the paper describes are:
1) Vertex decimation - deleting a vertex and then re-tessellating the resulting hole
2) Edge contraction - contract edges to a single vertex (what we learned in class)
3) Appearance-Preserving Simplification (described better in this paper by Cohen et al: http://gamma.cs.unc.edu/APS/APSlossy.pdf) - this is a pretty funky approach that is quite different from the other two. To do this we store color and curvature information, as well as surface position. Traditional geometric simplification can filter the surface position, whereas hardware is used to filter the color and normal information, resulting in a very good simplification. This algorithm does require the parameterization of the mesh in order to function properly, however, so may not always be applicable.
The two global simplification strategies mentioned are:
1) Vertex clustering - each vertex is assigned a weight based on perceptual importance. Then a subdivided 3D bounding box is placed around the mesh. Finally, all the vertices in a 3D grid cell are clustered to the position of the vertex with maximum weight. This algorithm is extremely efficient to implement, but can cause extreme collapses in the original mesh!
2) Shape approximation - this algorithm segments the input mesh into a set of non-overlapping connected regions, and then fits a locally-approximating plane (or other shape equivalent) to each one.
In class we learned about one mesh simplification strategy in detail, but there are actually many ways of simplifying meshes out there. This is a great read that summarizes various mesh simplification techniques: http://jerrytalton.net/research/t-ssmsa-04/paper.pdf
In essence, simplification strategies can be grouped into two categories: local strategies that iteratively simplifies the mesh by the repeated application of a local operator, and global strategies that can be applied to the input mesh as a whole. Simplification via quadratic error is a local strategy, and that is what we learned about today. The three local strategies that the paper describes are: 1) Vertex decimation - deleting a vertex and then re-tessellating the resulting hole 2) Edge contraction - contract edges to a single vertex (what we learned in class) 3) Appearance-Preserving Simplification (described better in this paper by Cohen et al: http://gamma.cs.unc.edu/APS/APSlossy.pdf) - this is a pretty funky approach that is quite different from the other two. To do this we store color and curvature information, as well as surface position. Traditional geometric simplification can filter the surface position, whereas hardware is used to filter the color and normal information, resulting in a very good simplification. This algorithm does require the parameterization of the mesh in order to function properly, however, so may not always be applicable.
The two global simplification strategies mentioned are: 1) Vertex clustering - each vertex is assigned a weight based on perceptual importance. Then a subdivided 3D bounding box is placed around the mesh. Finally, all the vertices in a 3D grid cell are clustered to the position of the vertex with maximum weight. This algorithm is extremely efficient to implement, but can cause extreme collapses in the original mesh! 2) Shape approximation - this algorithm segments the input mesh into a set of non-overlapping connected regions, and then fits a locally-approximating plane (or other shape equivalent) to each one.