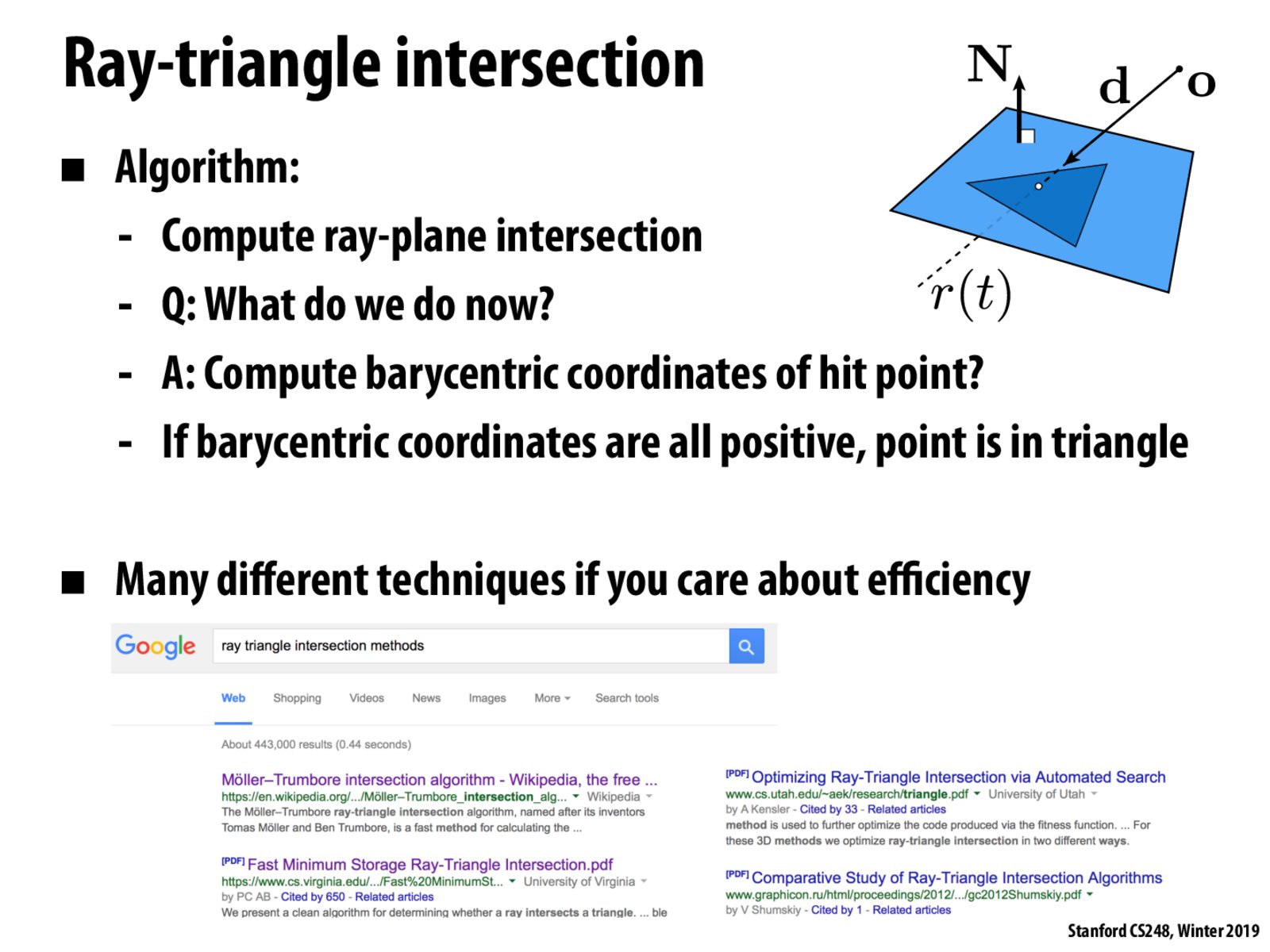
So is the general idea of this method basically finding the point/plane intersection and then treating the rest like the 2d case of finding whether a point is inside a triangle then?
Should the constraint also be less equal than 1?
So is the general idea of this method basically finding the point/plane intersection and then treating the rest like the 2d case of finding whether a point is inside a triangle then?
Should the constraint also be less equal than 1?